履带车辆
履带车辆在崎岖地形通过性方面远超轮式车辆。履带的作用原理相当于车辆”随身携带道路”——通过大面积的履带接地面积分散车辆重量,使其能够在泥泞、沙地和积雪等松软表面上自如行驶。
履带类型
橡胶履带
由单个实心橡胶环制成,乐高共推出过七种变体,其中四种仍在使用。
规格与特点:
- 34个节段,宽度略小于3凸点
- 深胎面提供出色的牵引力
- 需要专用链轮驱动,链轮直径约3凸点
- 履带完全拉伸需要两个相距13凸点的链轮
- 必须用16齿齿轮锁定链轮使其随轴旋转
优点: 单个牢不可破的环,牵引力极佳,行驶噪音最小 缺点: 长度固定不可调,链轮尺寸单一,橡胶会随时间老化
硬塑料履带
由可拆卸的单个塑料链环相互连接而成,长度可自由调整。分为旧款(较小,15链节=13凸点)和新款(较大,8链节=13凸点)两种版本。
旧款特点:
- 宽度略小于3凸点,结构类似乐高链条
- 可用五种齿轮作为链轮
- 链节开口可插入板或瓷砖加宽并改善外观
新款特点:
- 宽度略小于5凸点,每链节1.625凸点长
- 需使用专用链轮(大链轮可缠绕10链节,小链轮可缠绕6链节)
- 针孔可用于加装Technic砖块或编织橡皮筋以改善牵引力
硬塑料履带优缺点:
- 优点:长度可调,外观逼真,链轮选择多样
- 缺点:牵引力较差,易散架(旧款),张紧度难以精确控制(新款),噪音较大
橡胶履带与硬塑料履带的性能对比
选择履带类型需要综合考虑多个维度。在牵引力方面,橡胶履带凭借深胎面和弹性材质远胜硬塑料履带。橡胶材质能够有效咬合各种表面,在泥地和沙地中表现尤为突出。硬塑料履带的牵引力则主要依赖链节的齿形结构,在平坦硬质表面上尚可,但在松软地形中容易打滑。
在耐久性方面两者各有短板。橡胶履带会随时间老化变硬、弹性下降,但作为整体结构不会断裂散架。硬塑料履带中的旧款较脆弱,链节连接处容易在重载下断裂;新款更为坚固但非常僵硬,反复弯折后连接处也可能松动。在维护便利性上,硬塑料履带因可拆卸而更具优势,损坏的单个链节可以单独更换。
噪音表现差异显著。橡胶履带几乎无声运行,硬塑料履带则产生明显的咔嗒声,新款尤其响亮。对于注重声学体验的展示模型,橡胶履带是更好的选择。但在需要自定义长度或特定外观(如二战坦克的金属履带质感)的场景下,硬塑料履带则不可替代。
履带张紧度调节
履带张紧度是影响车辆性能的关键参数。张紧过松会导致履带打滑甚至脱落,特别是在车辆越障时;张紧过紧则增加传动系统负荷、加速零件磨损,并可能使硬塑料履带的链节连接处承受过大应力。
调节张紧度的最佳实践是:尽可能拧紧履带后,至少留出半个链节的间隙余量。对于橡胶履带,可以通过调整驱动链轮和惰轮之间的距离来控制张紧力,13凸点的标准间距可以实现完全拉伸。对于硬塑料履带,建议将驱动链轮安装在可微调位置的支架上,以便在实际运行中精确调整到最佳张紧状态。
在行驶过程中,履带张紧度会因温度变化和零件磨损而改变。一个实用的设计技巧是将惰轮(非驱动端链轮)安装在弹性悬挂臂上,利用弹簧或减震器的弹力自动维持履带张力。这种设计特别适合需要长时间运行的遥控模型,可有效防止履带因松弛而脱落。
履带轮系统
双链轮系统
最简单的轮配置,每条履带两个链轮——通常一个驱动、一个惰轮。约一半履带长度与链轮接触,因此链轮的驱动效率最高。通常选择后链轮作为驱动轮,因为将推进系统布置在车辆后部更为方便。
负重轮系统
在车辆底部增加不被驱动的负重轮以支撑车体重量,可显著提升车辆的浮地性(处理障碍物的能力)。负重轮可以弹性悬挂,通常位于比链轮更低的位置。真实坦克设计中,英国丘吉尔坦克使用了多达11个负重轮(极端小轮设计),而苏联T-34则使用大直径负重轮兼作托带轮。
托带轮系统
用于支撑履带上部,防止长履带因自重下垂。托带轮不被驱动也不需要悬挂,甚至可以固定不动——只要履带能在其上滑动即可。长履带车辆通常至少需要两个托带轮。
履带悬挂系统
平衡悬挂(Bogie)
最简单的履带悬挂——一根梁两端各装一个负重轮,围绕中心销自由旋转。当一个负重轮上升2凸点时,中心轴仅上升1凸点(50%传递率),提供良好的浮地性。新款乐高履带有专用的加固型Bogie变体。
带减震器的拖臂悬挂
每个负重轮安装在独立拖臂末端,由减震器支撑。6.5L减震器最适合低轮廓的履带车辆。设计时需注意履带的旋转方向敏感性,以及前后负重轮承受不均等负载——前后轮通常应使用比中间轮更硬的减震器。
扭杆悬挂
以乐高轴的弹性作为弹簧元件的巧妙设计。扭杆一端锁定在底盘上,另一端连接拖臂和负重轮。负重轮越障时拖臂摆动使轴扭转,障碍通过后轴自动回弹复位。
优点: 仅需常见零件,硬度可通过轴的长度调节,利用履带内部最小空间 缺点: 占用车体底部1凸点空间,每个负重轮平均负载需超过100克才能有明显效果。8L轴可承受约0.25公斤负载,经久耐用。
履带车辆的转向原理
与轮式车辆依靠前轮偏转实现转向不同,履带车辆的转向通过差速控制两条履带的速度实现。最基本的方式是让一侧履带减速或停止,车辆便向该侧转向。更为激进的转向方式是使两条履带反向旋转(一侧前进、一侧后退),实现原地转向(pivot turn),这种转向方式需要的空间最小但会对地面造成较大剪切。
在乐高模型中实现履带转向通常有两种方案。第一种是使用两个独立电机分别驱动左右履带,通过遥控差速控制转向,这种方式操控性最佳但需要双电机。第二种是使用单个电机配合差速器和转向制动器——差速器将动力分配给两侧履带,转向时通过制动器减缓一侧履带速度实现转向,这种方式节省电机但转向半径较大、操控精度较低。对于追求真实感的坦克模型,推荐双电机方案,配合比例遥控可以实现极为细腻的转向控制。
项目展示图片
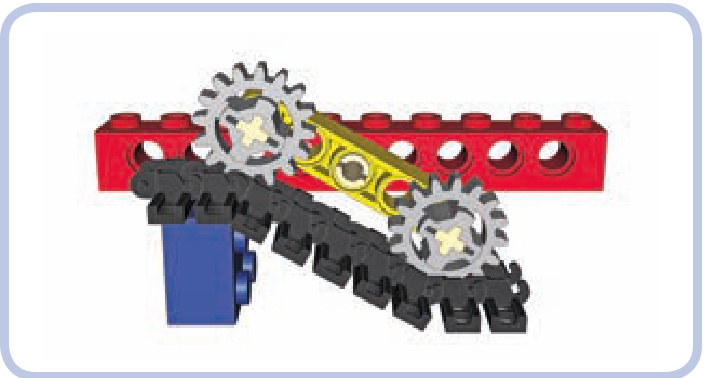
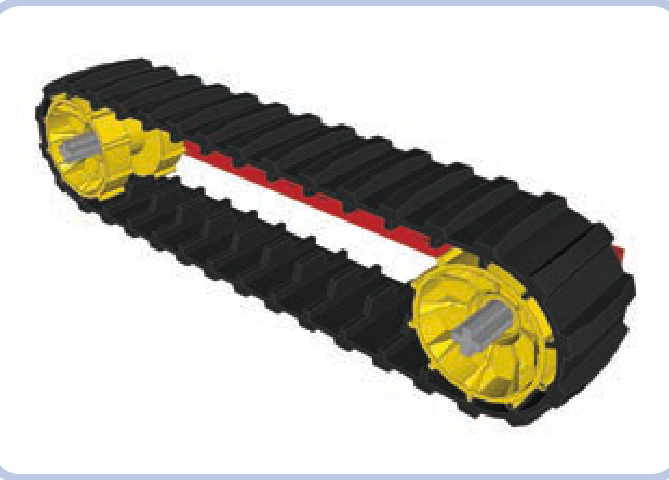 大型Technic履带与专用履带轮毂
大型Technic履带与专用履带轮毂
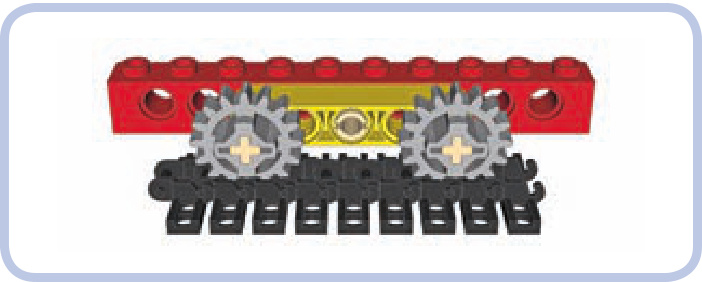
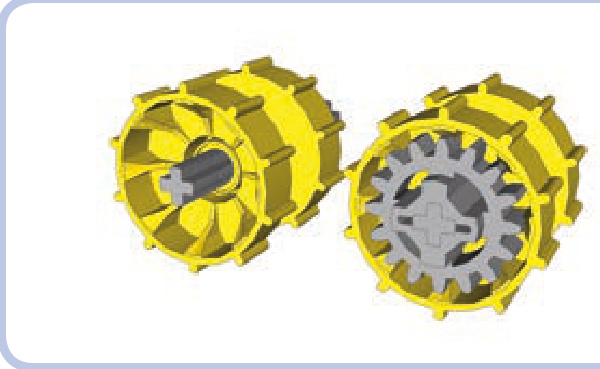 履带轮毂与16齿齿轮的配合使用
履带轮毂与16齿齿轮的配合使用
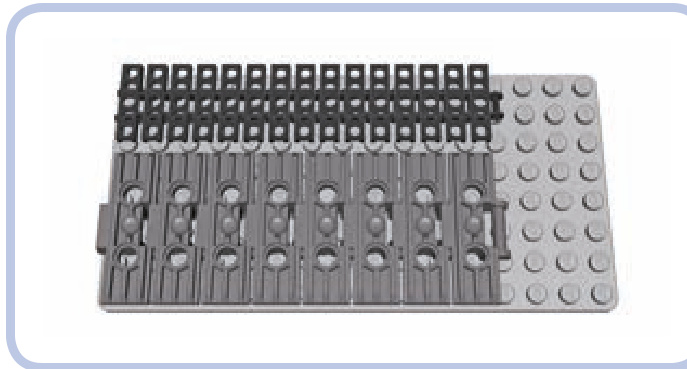 旧款15链节履带与新款8链节履带,展开长度均为13凸点
旧款15链节履带与新款8链节履带,展开长度均为13凸点
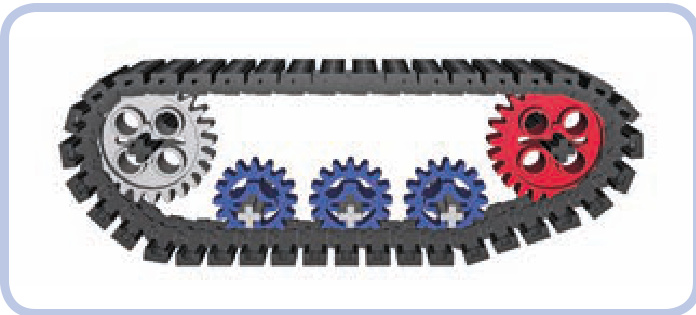
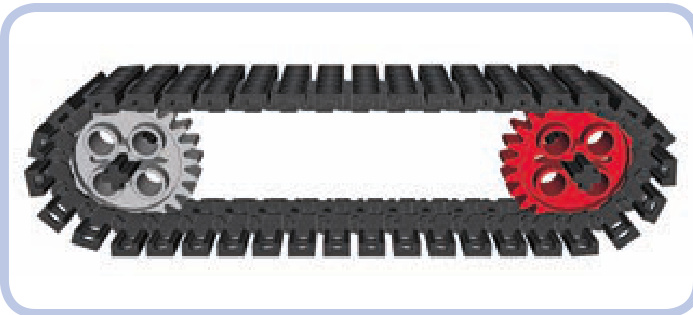 双链轮履带系统,灰色为惰轮,红色为驱动轮
双链轮履带系统,灰色为惰轮,红色为驱动轮
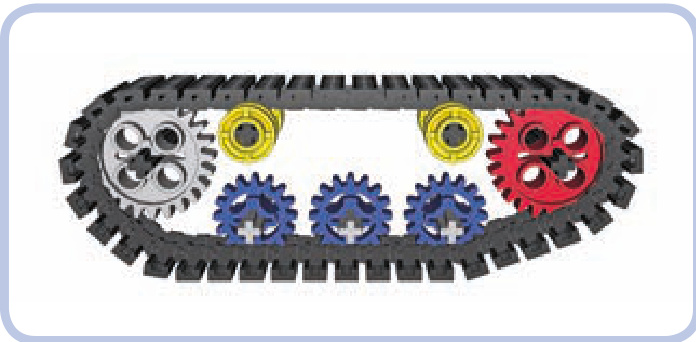
 带两个链轮和三个负重轮的履带系统
带两个链轮和三个负重轮的履带系统
 英国丘吉尔坦克每侧11个负重轮的极端小轮设计
英国丘吉尔坦克每侧11个负重轮的极端小轮设计
 带两个链轮、三个负重轮和两个托带轮的完整轮系
带两个链轮、三个负重轮和两个托带轮的完整轮系
 苏联T-34的大直径负重轮同时接触履带上下两部分,无需托带轮
苏联T-34的大直径负重轮同时接触履带上下两部分,无需托带轮
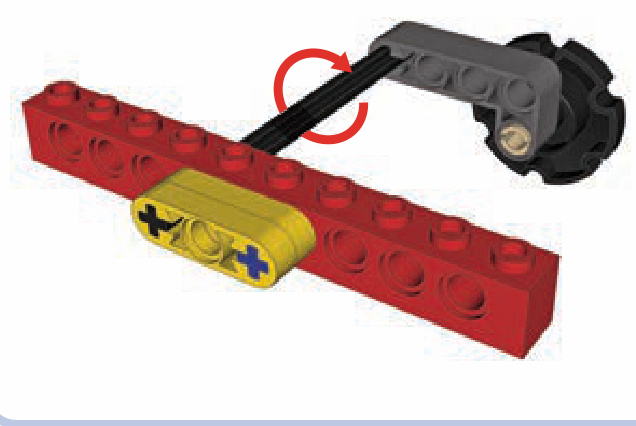
 黄色梁围绕中心销旋转构成的双轮Bogie
黄色梁围绕中心销旋转构成的双轮Bogie
 Bogie的行程衰减效应:负重轮上升2凸点,中心轴仅上升1凸点
Bogie的行程衰减效应:负重轮上升2凸点,中心轴仅上升1凸点
 扭杆悬挂基本方案,黑色8L轴作为弹性元件
扭杆悬挂基本方案,黑色8L轴作为弹性元件
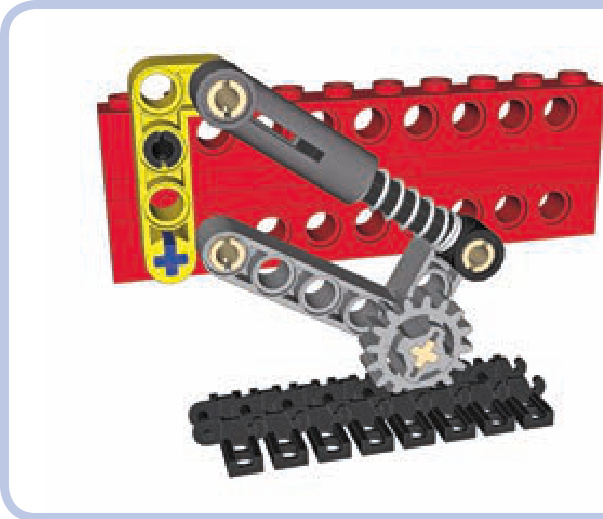 带减震器的简单拖臂悬挂
带减震器的简单拖臂悬挂